
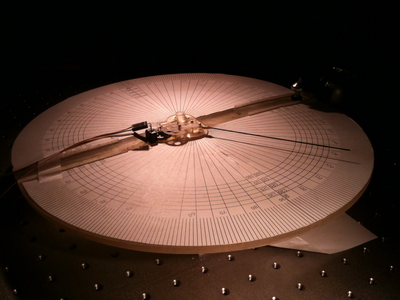
This work is conducted at the Wright-Patterson Air Force Base in Ohio in the summer of 2010 as a visiting researcher. Our major goal was to design a mechanism driving system for hovering flapping wing micro-aerial vehicle (MAV). Much work has been done in the past to realize flapping wing “aviation”. Despite these advances in mechatronics and material science, not much work has been focusing on hovering or agile operation, which is more critical in rescue and defense applications. Hence, our work is gearing towards the design and fabrication of such state-of-the-art hover-capable MAVs.
Related Papers:
D. B. Doman, C. P. Tang, and S. J. S. Regisford, “Modeling Interactions between Flexible Flapping Wing Spars, Mechanisms, and Drive Motors,” Paper 2011-6389, Proceedings of the AIAA Guidance, Navigation, and Control Conference, Portland, Oregon, USA, August 8-11, 2011. [PDF]
D. B. Doman, C. P. Tang, and S. J. S. Regisford, “Modeling Interactions between Flexible Flapping Wing Spars, Mechanisms, and Drive Motors,” Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Portland, Oregon, USA, August 8-11, 2011.[PDF]
C. P. Tang, “Lagrangian Dynamic Formulation of a Four-Bar Mechanism with Minimal Coordinates”, March 2006. [PDF]