
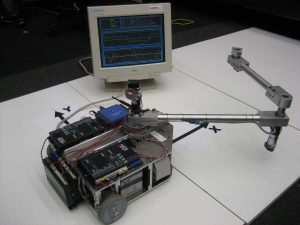
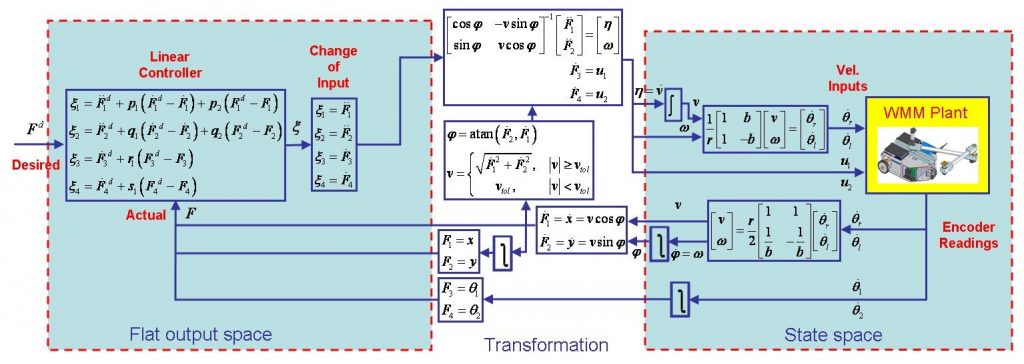
Differential flatness-based integrated point-to-point trajectory planning and control method for a class of nonholonomic wheeled mobile manipulator is presented. We demonstrate that its kinematic model possesses a feedback-linearizable description due to the flatness property, which allows for full state controllability. Trajectory planning can then be simplified and achieved by polynomial fitting method in the flat output space to satisfy the terminal conditions, while control design reduces to a pole-placement problem for a linear system. The method is then deployed on our custom constructed WMM hardware to evaluate its effectiveness and to highlight various aspects of the hardware implementation.
Related Papers:
C. P. Tang, P. T. Miller, V. N. Krovi, J.-C. Ryu and S. K. Agrawal, “Differential Flatness-based Planning and Control of a Wheeled Mobile Manipulator – Theory and Experiment”, IEEE/ASME Transactions on Mechatronics, 2010. [Preprint]
C. P. Tang, “Differential Flatness-based Kinematic and Dynamic Control of a Differentially Driven Wheeled Mobile Robot”, Proceedings of the IEEE International Conference on Robotics and Biomimetics, Guilin, Guangxi, China, December 18-22, 2009. [Preprint]
C. P. Tang, P. T. Miller, V. N. Krovi, J.-C. Ryu and S. K. Agrawal, “Kinematic Control of Wheeled Mobile Manipulator – A Differential Flatness Approach”, Proceedings of the ASME Dynamic Systems and Control Conference, Ann Arbor, Michigan, USA, Oct 20-22, 2008. [Best Session Paper] [PDF]